
Talebe göre fiyat
Tarif
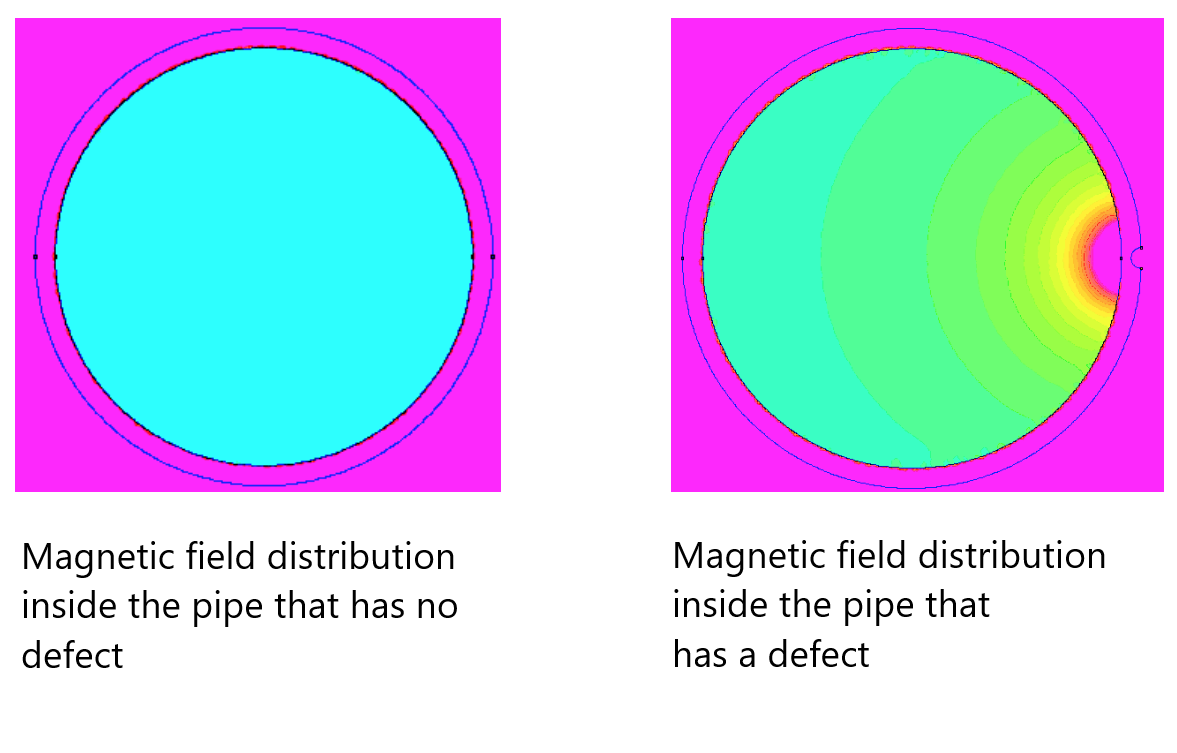
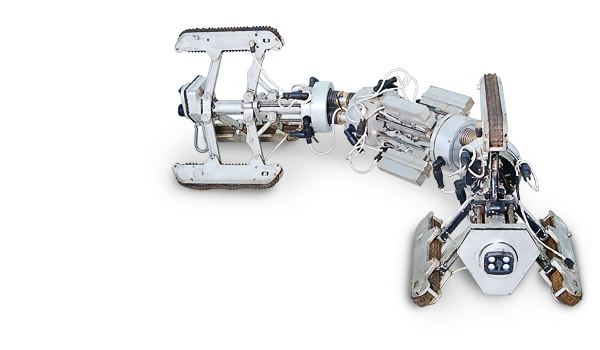
Robotun boruya yüklenmesi minimum 400 mm X 600 mm boyutundaki delik üzerinden yapılmaktadır. Robot boruya herhangi bir yükleme kameraların kaynak yapılmasını istememektedir. Robotun haraket etmesi ve teşhis yapması için boruda basınç altında suyun bulunması gerekmemektedir. HeatScan teşhis sistemi kusurların aranması için modife edilmiş manyetik kontrol yöntemini kullanmaktadır. Söz konusu yöntem, Ultrasonik kontrol yöntemine nazaran, korozyondan dolayı boruların düzsüzlüklerine duyarsızdır. Robot, kalıntılar ve şiddetli korozyondan dolayı diğer kontrol yöntemlerince kontrol edilmesine mümkün olmayan yerlerdeki boruların metal duvar kalıcı kalınlığını ölçmektedir.


Robot, suya dalarak çalışmasına izin veren su geçirmez gövdeye sahiptir. Su sıcaklığı 50°C’ye kadar olabilir. Kontrol verimliliği saatte 200 metredir.
HeatScan boruiçi teşhis sisteminin teknik özellikleri:
| Kontrol edilen çapların aralığı | DU400-DU1400 |
| Boru duvar kalınlığının aralığı | 1.5-16 mm |
| Yürüyüş uzaklığı | 300 m |
| Boru iç yüzeyinde kalıntılar büyüklüğü | 35 mm’ye kadar |
| Tespit edilen/ölçülen hataların boyutları | — geçişli kusur, çapı 6 mm’ye kadar — 30 mm’ye kadar çaplı, duvar kalınlığı % 20’sine kadar derinlikte korozyonlu kusur |
| Verimlilik | 120 – 200 m/h |
| Geçiş yapılan ayrıntı sayısı | 4 ad |
| T-şekillerden geçişi | evet |
| Kusur bölgesindeki kalıcı kalınlığını ölçme sapması | kalıcı kalınlığın % 15’e kadar |
| Nispi nemlilik | 100% |
| Çalışma sıcaklığının aralığı | -20º…+70ºС |
| Basınç | 101.3 kPa |
Cihaz kullanımı:
Kontrol Teknolojisi
Teşhis yapılması için boruya ulaşım sağlanmalıdır: robot borudaki delik üzerinden yüklenmektedir. Borudaki delik sıcak kamerada veya oyuk yardımı ile yapılabilir.
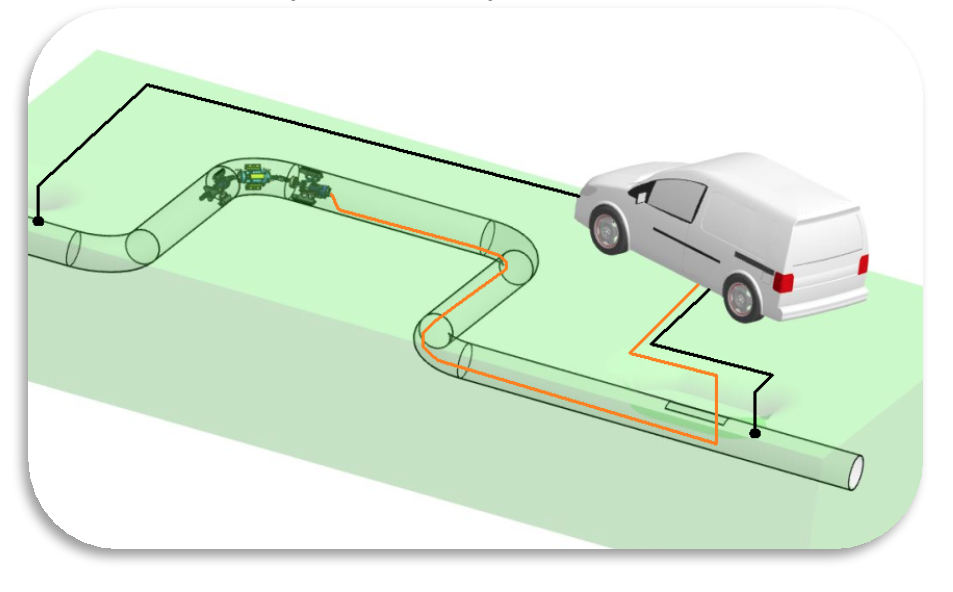
Teşhis sistemi, kullanım panosu dahil, B kategorisi otomobil temelinde yapılan otolaboratuvarda bulunmaktadır.
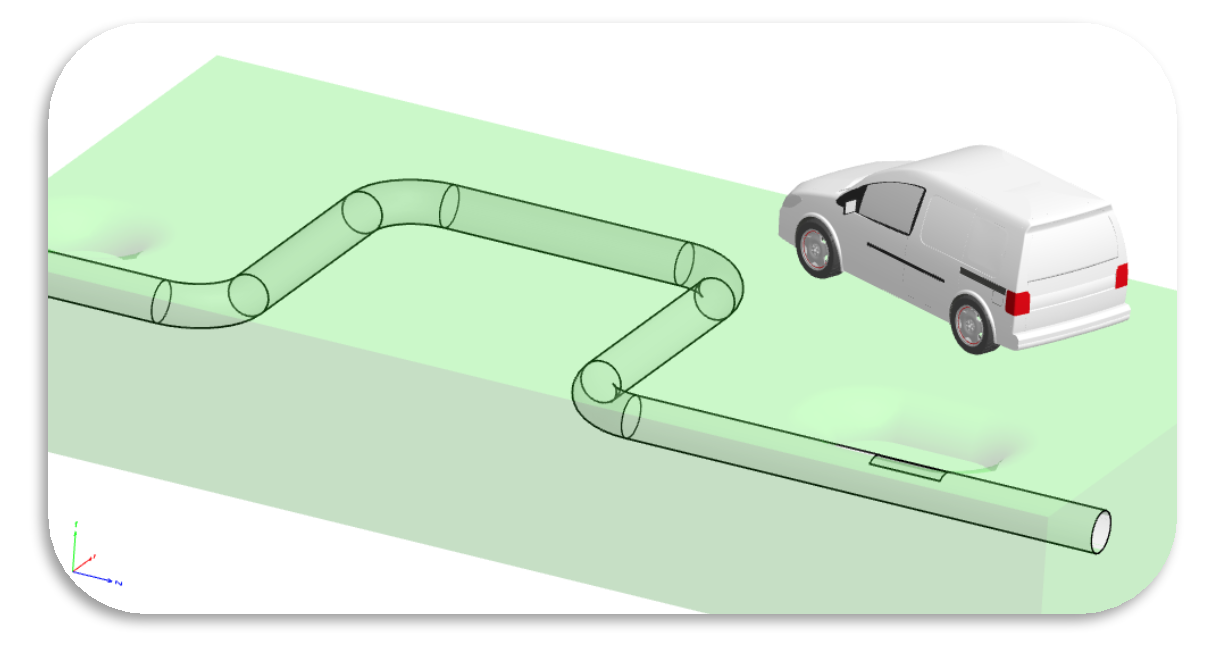
Robot yüklemenin bir noktasından, deliğin her tarafında 500 metreye kadarki mesafeyi teşhis yapabilir.
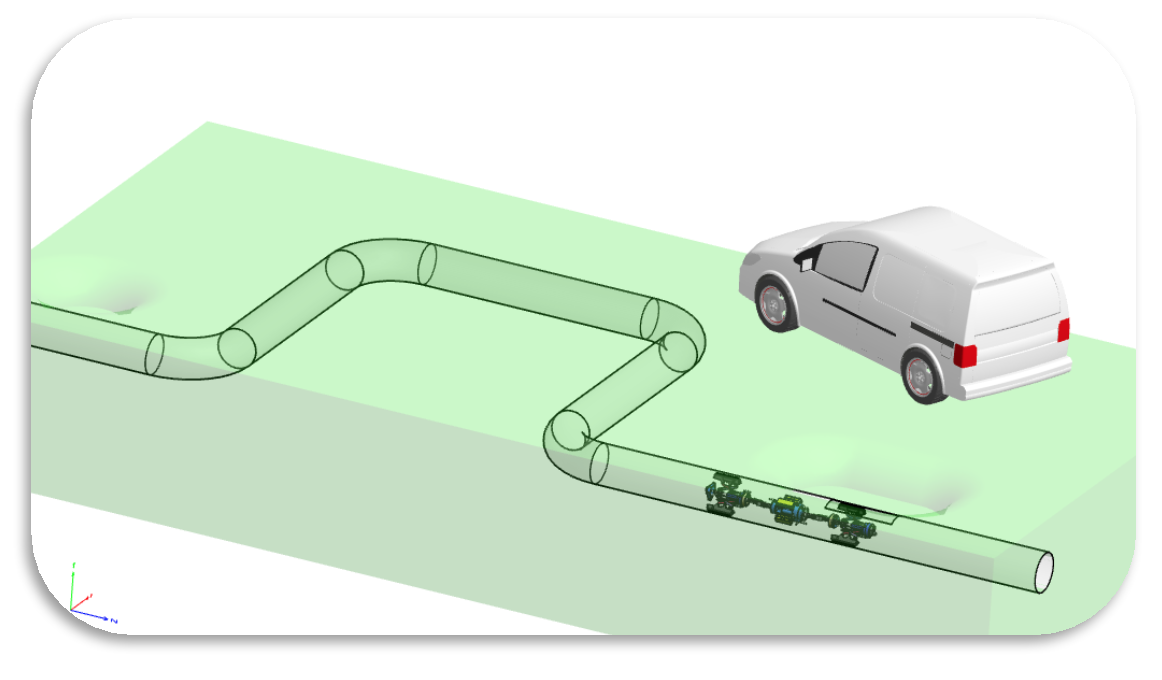
Teşhis yapılan boruların uçlarına elektrik kablolar takılması gerekmektedir. Boruya elektrik verilmekte, bundan dolayı manyetik alanlar uyarılacak ve bunların dağılması borunun içindeki robottaki sensörler tarafından okunacaktır.
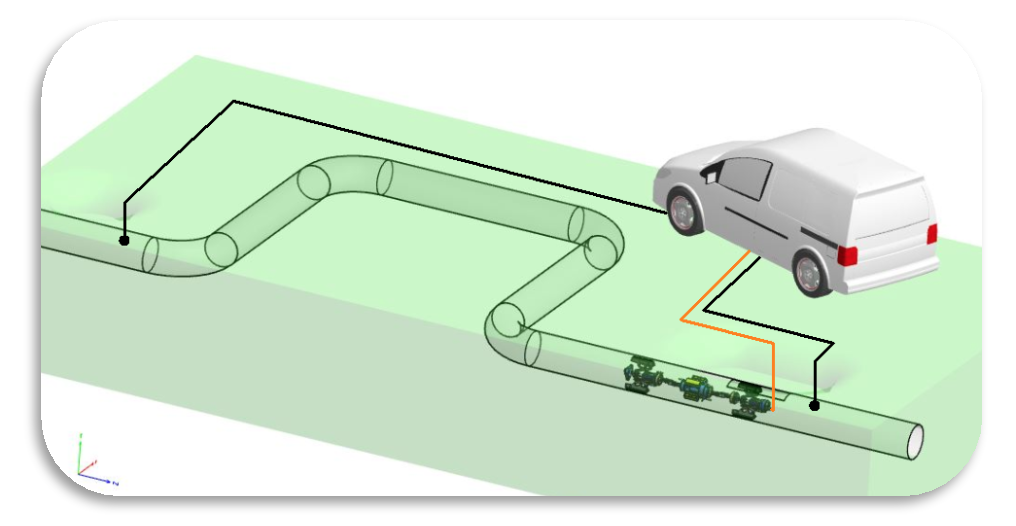
Teşhis robotu boru içinde boru alanının % 100’ünü tarayarak haraket etmektedir. Sensörler, kusurların bulunduğu yerlerdeki manyetik alandaki sapmaları tespit etmektedir. Özel bir algoritmayı kullanarak program metal duvarın kalıcı kalınlığını ölçmektedir.