
询价
说明
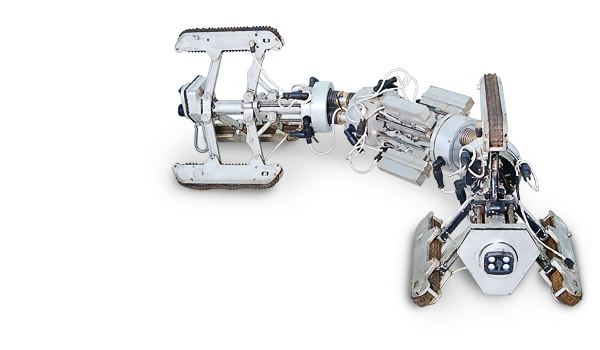
HeatScan合体旨在使用诊断机器人检测管道缺陷并评估有缺陷部分的剩余寿命。该技术不需要管道的初步准备,允许您通过一层高达35毫米的沉积物来监控金属的状态。该综合体的诊断机器人配备六条轨道,能够通过具有显着污染水平的区域。我司能够向您提供比较复杂的管道内部诊断服务。
机器人通过最小尺寸为400毫米 X600毫米的切口装入管道。机器人不需要焊接到管道
装货室。机器人移动和进行诊断时,就不需要管道里的加压水。HeatScan诊断复合体使用改进的磁检查方法来查现有的缺陷。与超声波控制方法不同,这种方法对腐蚀引起的管道表面不规则性不敏感。机器人在由于存在沉积物和严重腐蚀而无法通过其他控制方法控制的地方测量管道金属壁的残余厚度。


机器人有一个密封的身体,可以直接浸泡在水中使用。这种情况下,水温可达50°C。监测能力高达每小时200米。
HeatScan管内诊断综合体的技术参数:
| 受控直径范围 | DN400-DN1400 |
| 管壁厚度范围 | 1.5-16 毫米 |
| 滑走距离 | 300 米 |
| 管内表面的沉积物量 | 到35毫米 |
| 检测/测量缺陷尺寸 | -直径为6毫米的贯通缺陷 -直径为30毫米,深度为壁厚20%的腐蚀损伤 |
| 效率 | 120–200米/小时 |
| 可通行分行数目 | 4件 |
| 走到三通管 | 有 |
| 测量缺陷区残余厚度的误差 | 残余厚度的15% |
| 相对湿度 | 100% |
| 工作温度范围 | -20º…+70ºС |
| 压力 | 101.3千帕м |
设备用途:
控制技术
对于诊断,有必要提准备管道的通道:机器人通过管道的切口加载。
切口可以在热室中或使用探井来做。
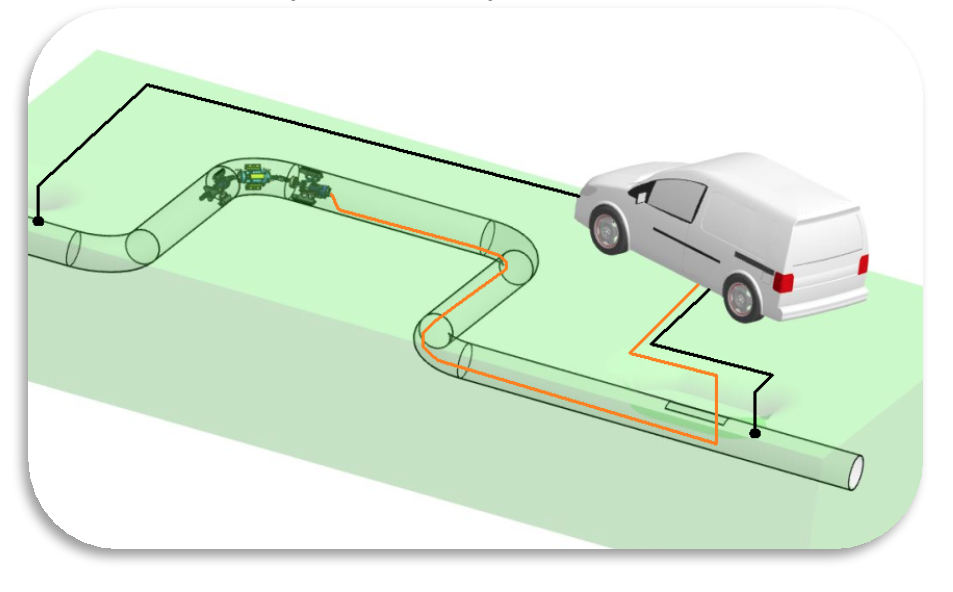
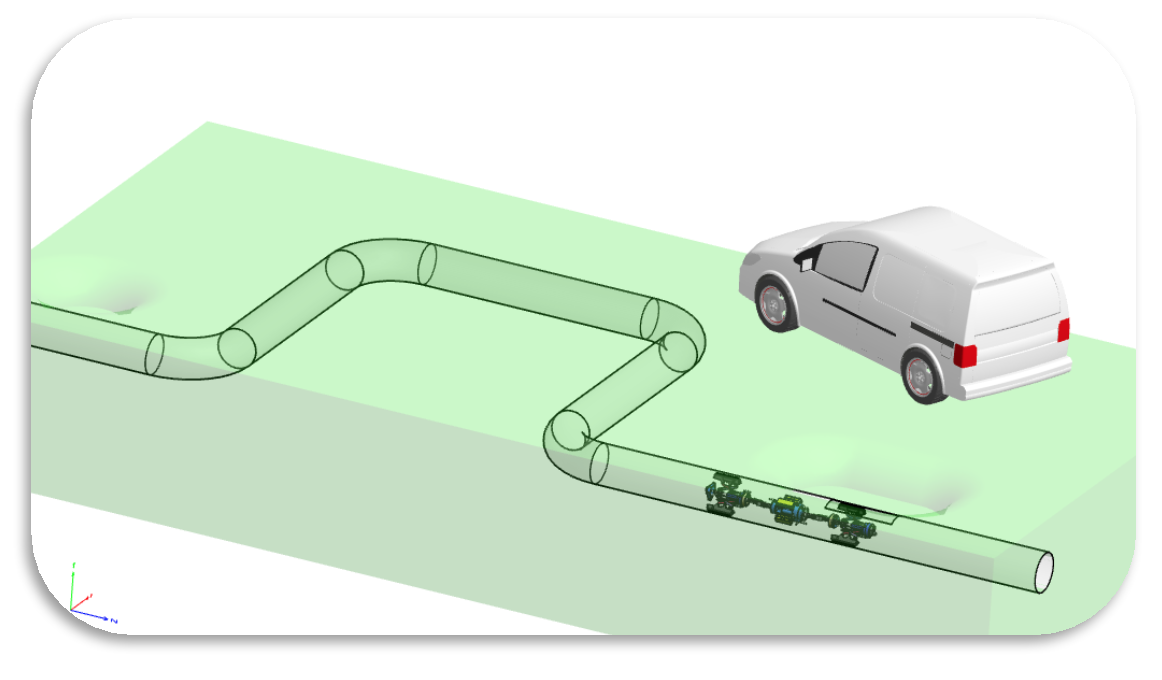
诊断综合体,包括控制面板,位于B类汽车的汽车实验室。
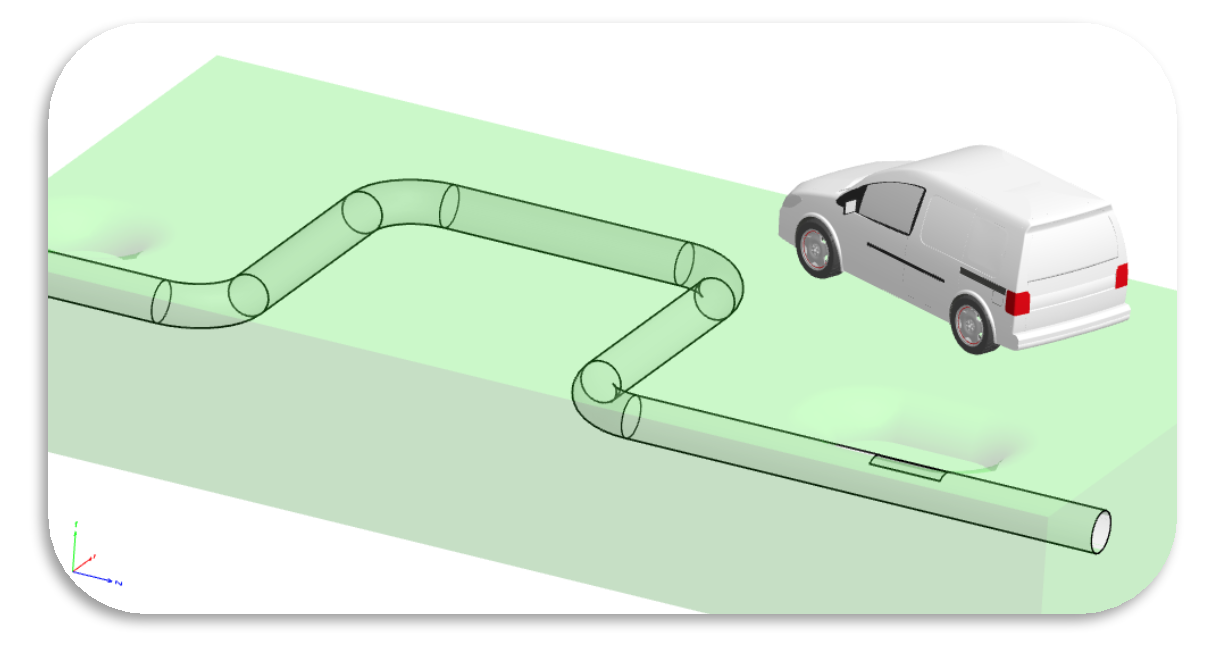
从一个装载点,机器人从切口往每个方向都可以诊断500米。
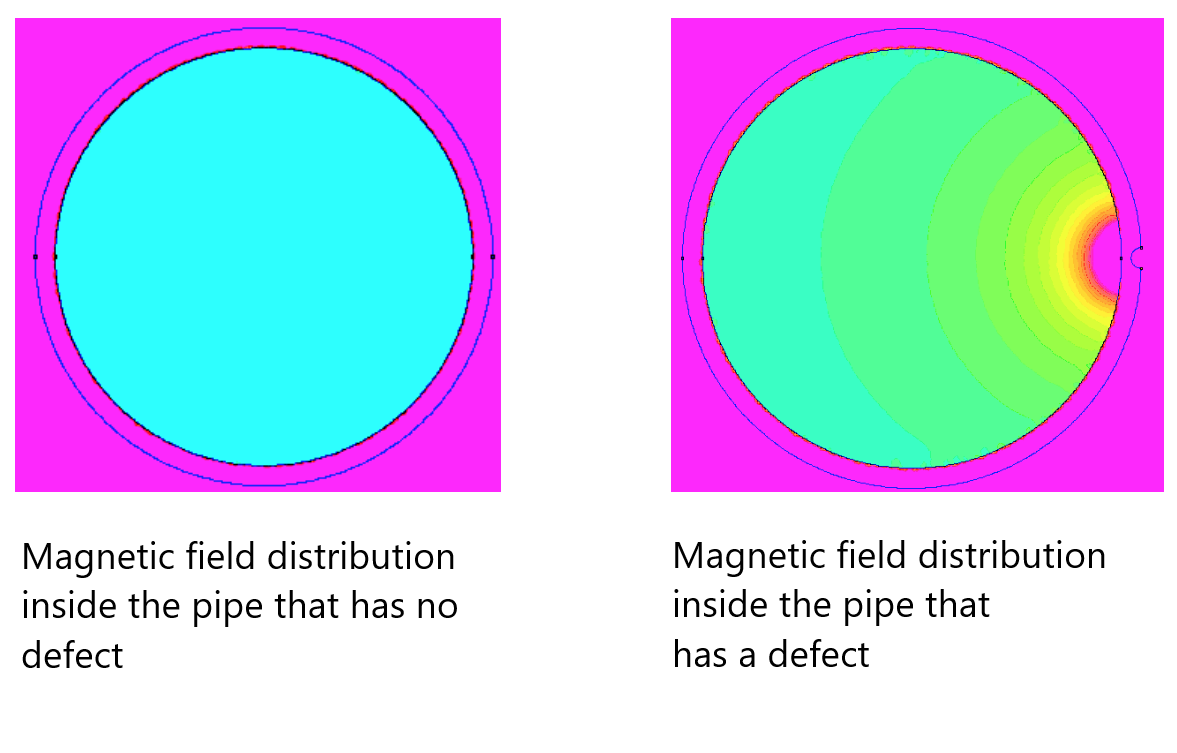
电线必须连接到管道的第一段的端部。电流通过管道,这是激发磁场所必需的,磁场的分布由管道内机器人上的传感器读取。
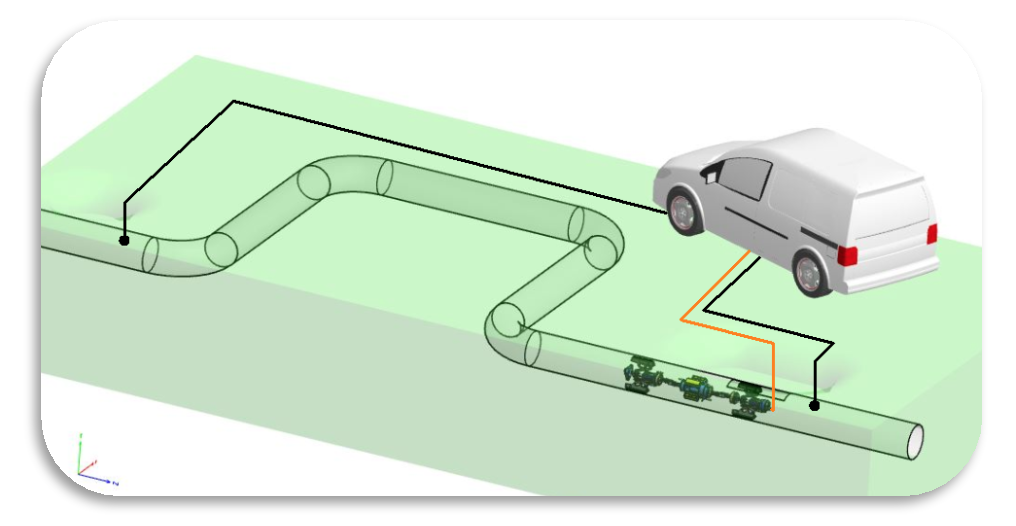
诊断机器人在管道内移动,扫描100%的管道面积。传感器检测缺陷位置的磁场异常。使用特殊算法,该程序确定金属的残余厚度。