
価格 のリクエスト
製品詳細
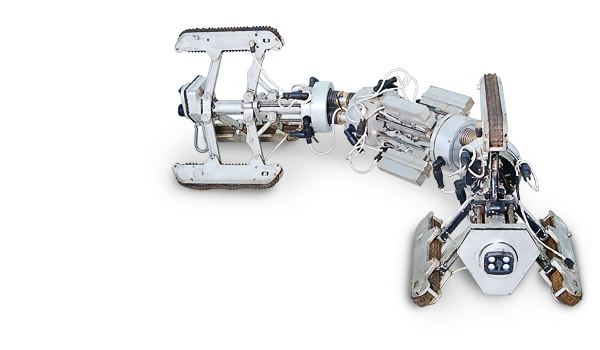
HeatScanは、管内検査ロボットを使ってパイプラインの欠陥を検出し、欠陥部分の残寿命を評価する検査装置です。配管の前処理が不要で、厚さが35 mmまである堆積物の中で金属の状態が検査できます。ロボットには、汚れが多い区画を自走するためのクローラーが六つ付いています。当社は、HeatScanを使った管内検査サービスをご提供いたします。
ロボットを小さな切り抜き(400 mm x 600 mm)から配管の中に挿入するので、配管の中に挿入用ケースなどを溶接する必要がありません。ロボットの自走及び検査実施には、配管の中の高圧水が不要です。HeatScan検査装置は欠陥を検出するために、変化された磁気探傷法を利用します。当探傷法は、超音波検査法と違って、腐食による配管表面粗さの影響を受けにくいです。堆積物が多くて腐食率が高いため他の検査法が適用できない箇所でも、ロボットは配管の残肉厚が測定でします。


ロボットのボディは密閉型であり、水中作業ができます。水温は50°Cまで可能です。検査能力は200m/hまでです。
HeatScan管内検査装置の仕様
| 検査する直径の範囲 | 定格直径400~1400 |
| 管体肉厚の範囲 | 1.5-16 mm |
| 自走距離 | 300 m |
| 管体の内側表面における堆積物の大きさ | 35 mm まで |
| 検出、測定される欠陥の寸法 | ・直径が6 mmの通し欠陥 ・深さが肉厚の20%で、直径が30 mmの腐食損傷 |
| 検査能力 | 120 – 200 m/h |
| 貫通される分岐管数 | 4本 |
| 3分岐貫通 | 可 |
| 欠陥近傍における残厚測定誤差 | 残厚の15% |
| 相対湿度 | 100% |
| 作業気温範囲 | -20º…+70ºС |
| 圧力 | 101.3 kPa |
機器の使い方:
検査技術
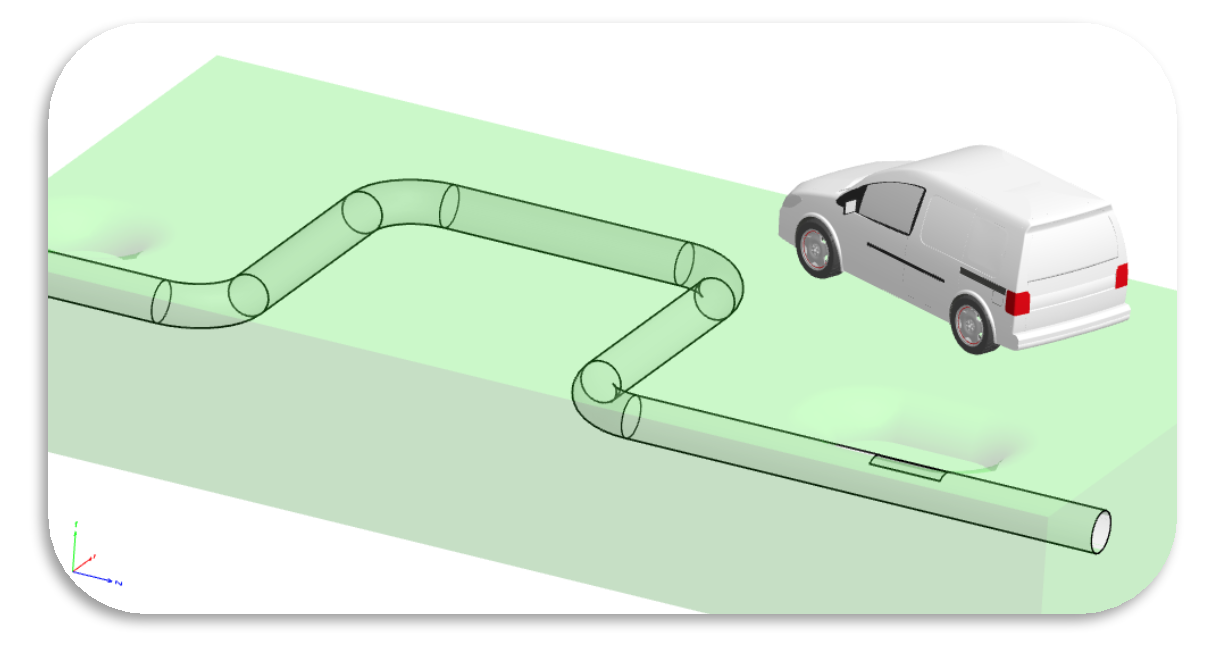
検査するためにパイプライン内のアクセスが必要ですから、ロボットは配管の切り抜きから中に挿入されます。
切り抜きは、管理設備収納スペース又はピットの中で切ります。
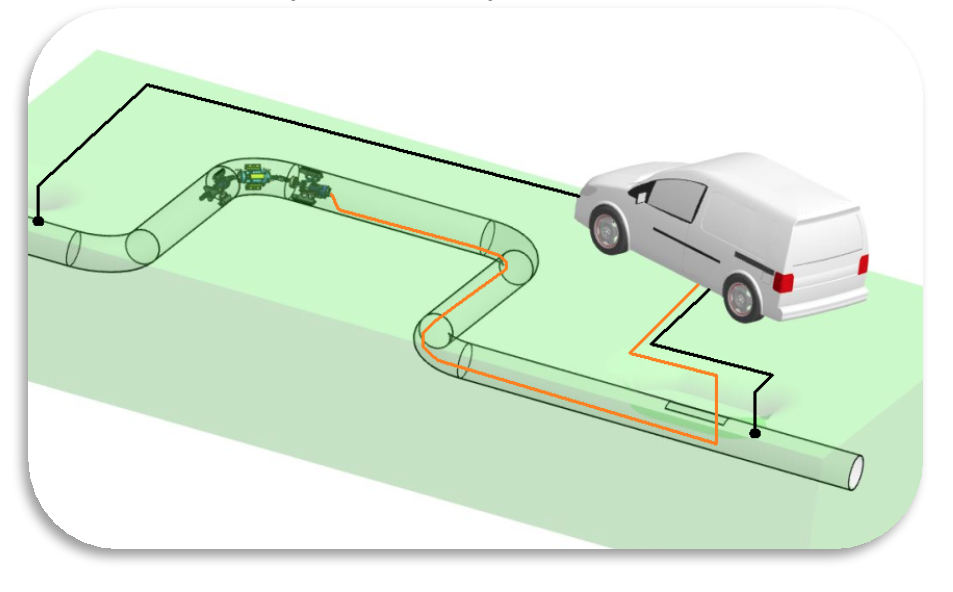
装置本体と操作リモコンは、Bカテゴリー自動車をベースにしている移動式ラボにあります。
ロボットは1つの挿入点から、切り抜きの両側に500メートルまで検査が行えます。
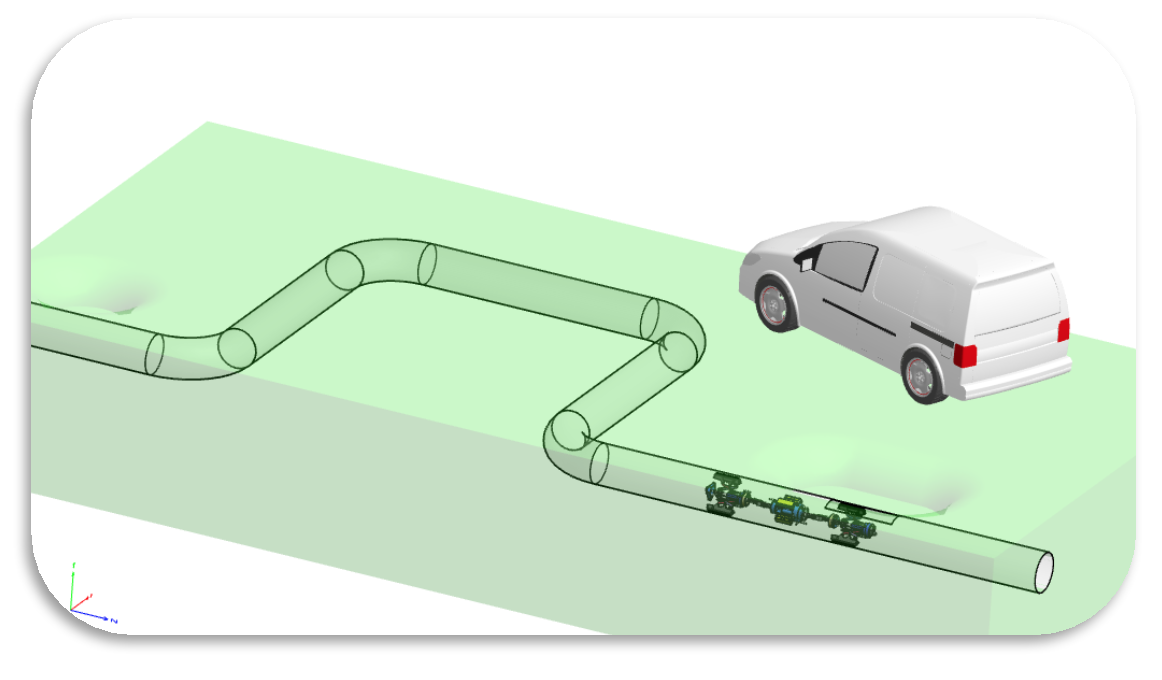
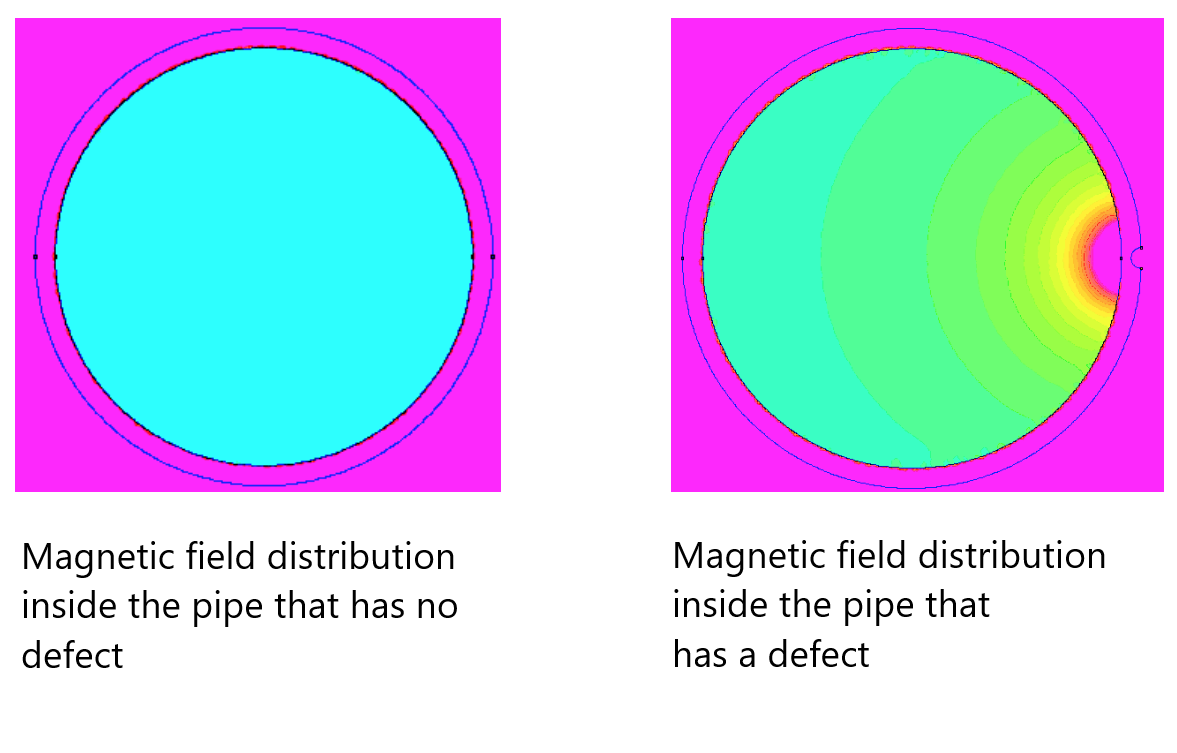
検査する配管区画の両端に電線を繋がなければなりません。磁場を発生させるために配管に電流を通します。管内にあるロボットのセンサーは磁場の変化を読み取ります。
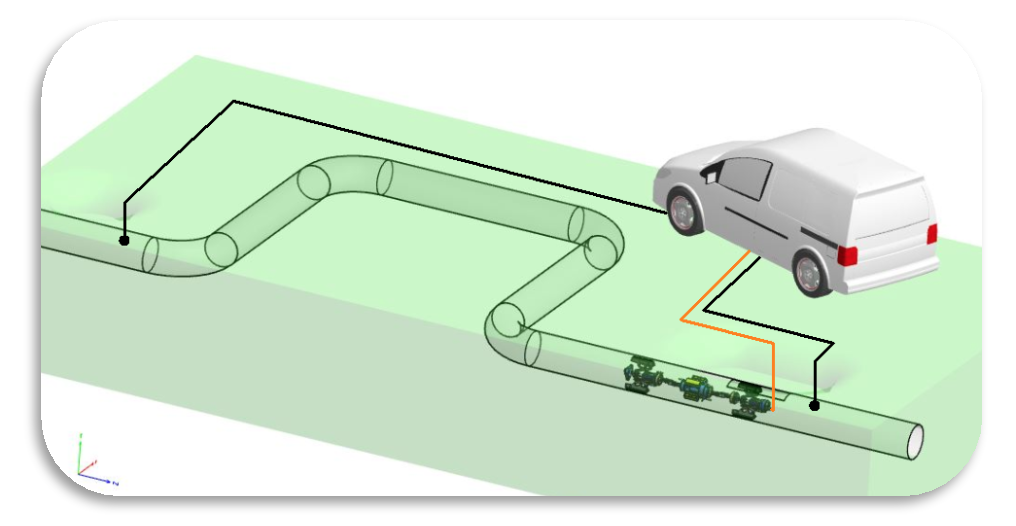
検査するロボットは配管内に挿入されて配管面積の100%スキャンします。センサーは欠陥近傍における磁場の異常を検出します。特殊アルゴリズムを適用するソフトウェアは金属の残厚を確定します。