
Prezzo su richiesta
Descrizione
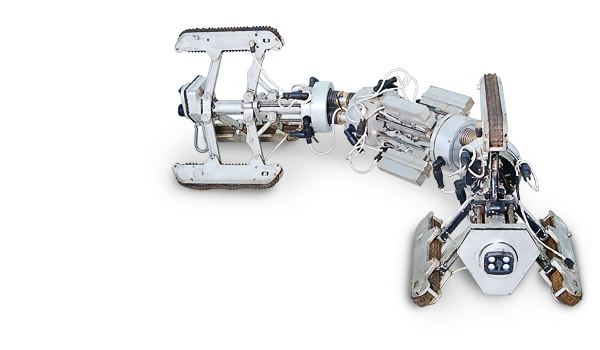
Il caricamento del robot nel tubo avviene attraverso un taglio con dimensioni minime di 400 mm x 600 mm. Il robot non richiede di saldare nel tubo camera di caricamento. Il movimento del robot e la diagnosi non richiedono acqua pressurizzata nel tubo. Il complesso diagnostico HeatScan utilizza un metodo di controllo magnetico modificato per individuare i difetti. Questo metodo è insensibile alle irregolarità della superficie del tubo causate dalla corrosione, a differenza del metodo di ispezione ad ultrasuoni. Il robot misura lo spessore residuo della parete metallica del tubo in luoghi che non possono essere controllati con altri metodi di controllo a causa della presenza di depositi e della forte corrosione.


Il robot ha un corpo ermetico che consente di lavorare direttamente con l’immersione in acqua. La temperatura dell’acqua può essere di 50°C. Capacità di controllo fino a 200 metri all’ora.
Caratteristiche tecniche del complesso di diagnostica intratubolare HeatScan:
| Gamma di diametri controllati | DN400-DN1400 |
| Gamma di spessori di parete del tubo | 1.5-16 mm |
| Gamma di corsa | 300 m |
| Quantità di sedimenti sulla superficie interna del tubo | Fino a 35 mm |
| Dimensioni dei difetti rilevabili/misurabili | – difetto perforante con diametro di 6 mm – danni da corrosione con un diametro di 30 mm e una profondità del 20% dello spessore della parete |
| Prestazione | 120 – 200 m/h |
| Numero di derivazioni passabili | 4 pz |
| Passaggio dei raccordi a T | sì |
| Incertezza di misura dello spessore residuo nell’area di difetto | 15% dello spessore residuo |
| Umidita relativa | 100% |
| Intervallo di temperatura di funzionamento | -20º…+70ºС |
| Pressione | 101.3 kPa |
Uso dello strumento:
Tecnologia di controllo
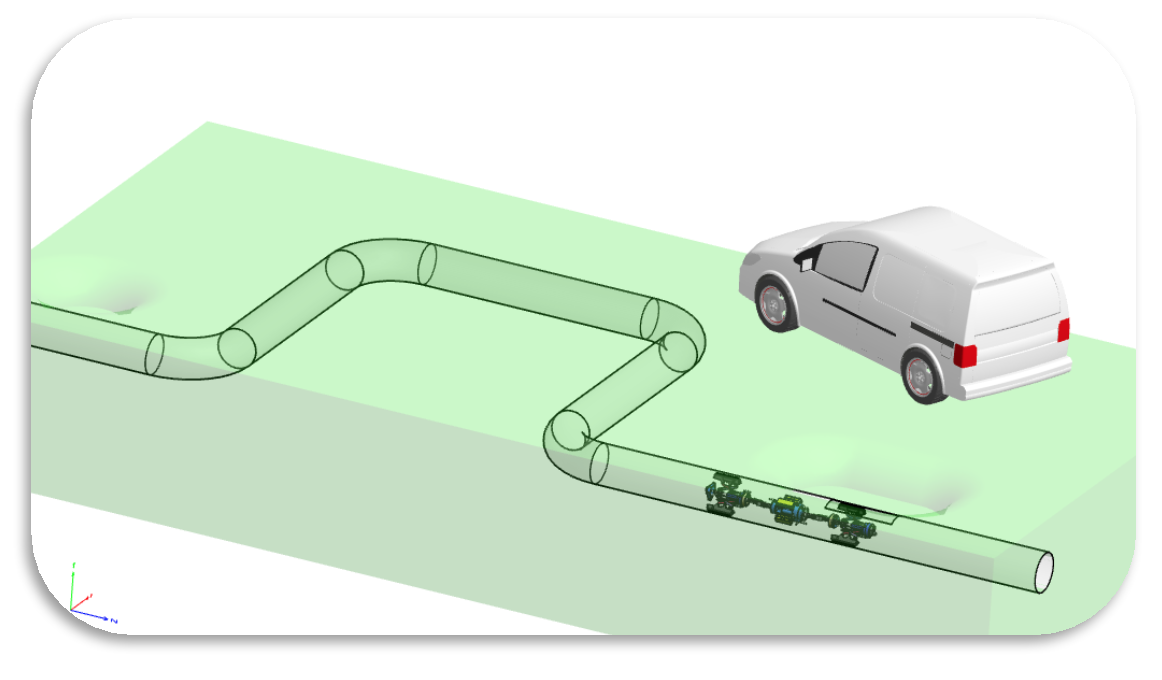
Per eseguire la diagnostica, è necessario garantire l’accesso alla tubazione: il robot viene caricato attraverso un taglio nel tubo.Il taglio può essere realizzato in una camera di calore o utilizzando una fossa.
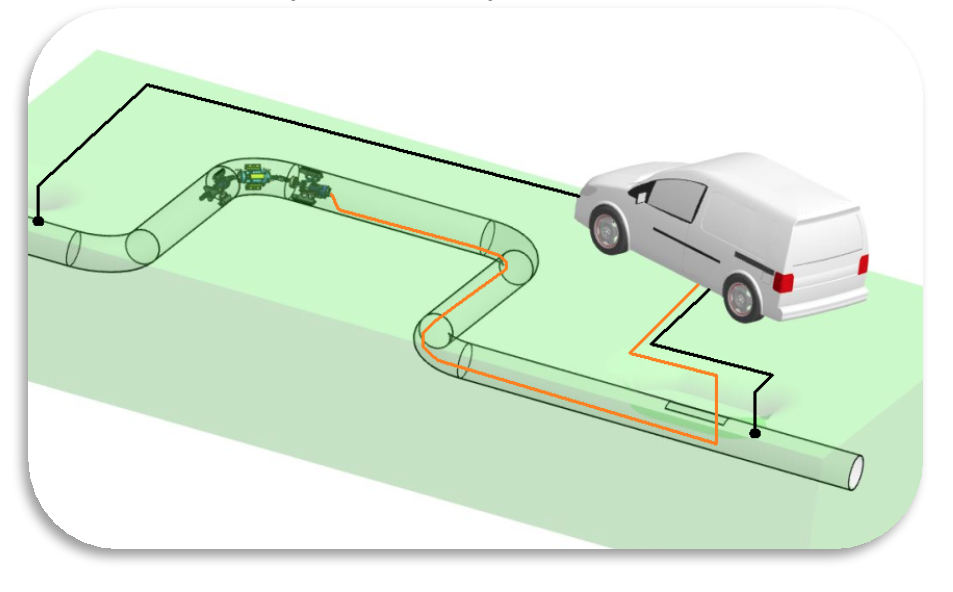
Il complesso diagnostico, compreso il pannello di controllo, si trova in un laboratorio automobilistico basato sul veicolo di categoria B.
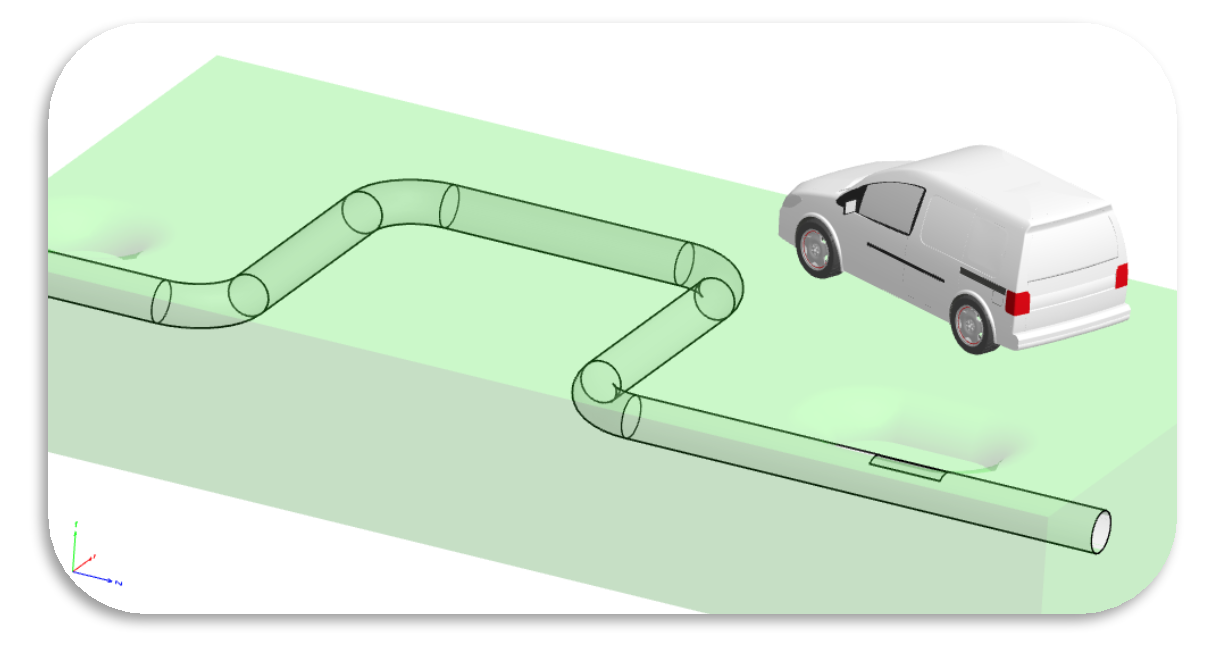
Da un punto di carico, il robot può diagnosticare fino a 500 metri su ciascun lato dell’apertura.
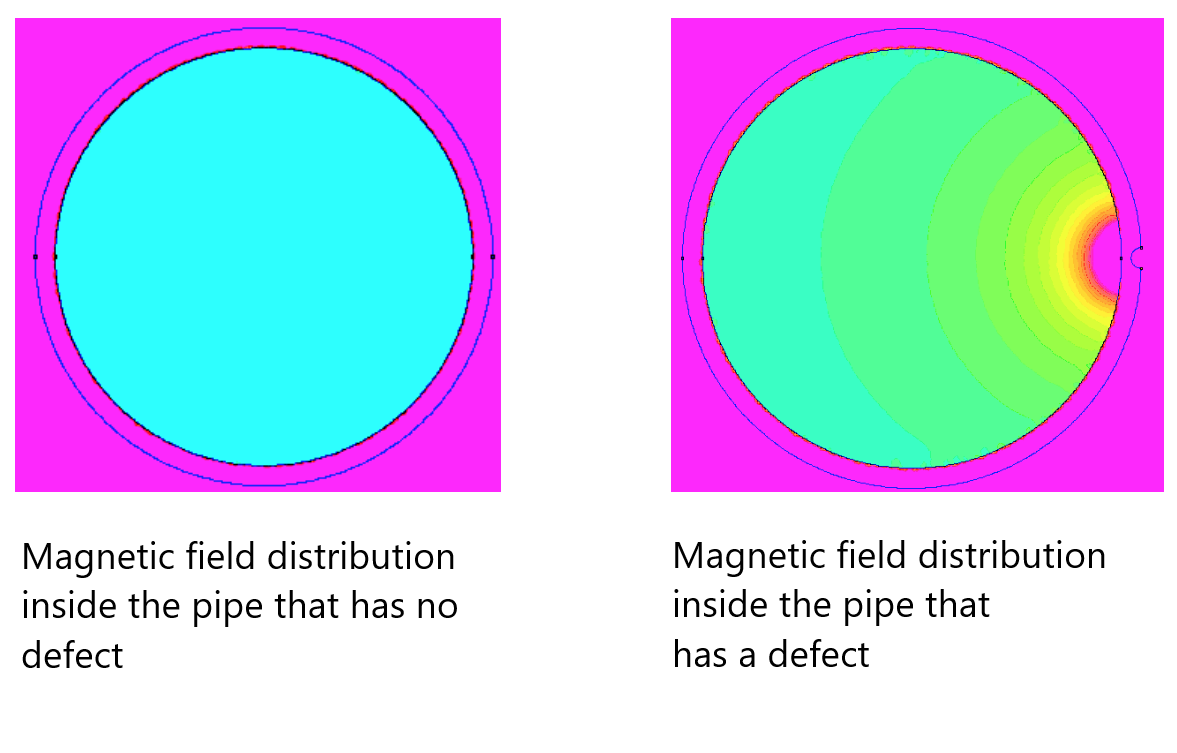
I cavi elettrici devono essere collegati alle estremità del tubo da diagnosticare. La corrente elettrica viene passata attraverso il tubo, questo è necessario per l’eccitazione dei campi magnetici, la cui distribuzione viene letta dai sensori sul robot all’interno del tubo.
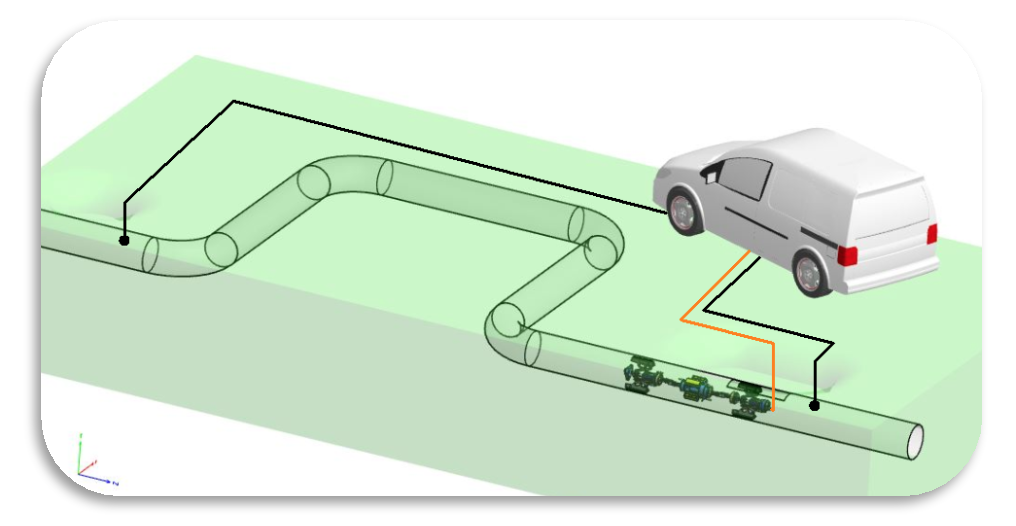
Il robot diagnostico si muove all’interno della tubazione, producendo una scansione del 100% dell’area del tubo. I sensori rilevano anomalie del campo magnetico nei siti di difetti. Utilizzando un algoritmo speciale, il programma determina lo spessore residuo del metallo.