HeatScan
![]()

Preis auf Anfrage
Beschreibung
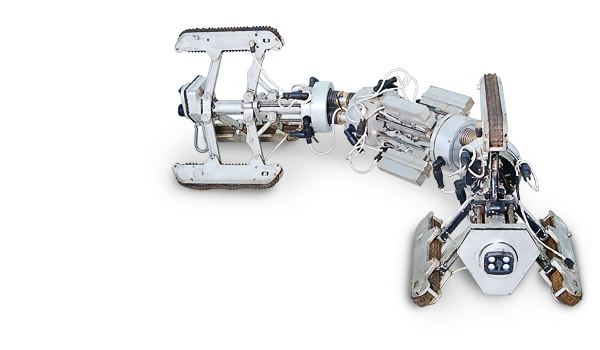
HeatScan wurde entwickelt, um mit Hilfe eines Diagnoseroboters Rohrleitungsdefekte zu erkennen und die verbleibende Lebensdauer der defekten Abschnitte zu bewerten. Die Technologie erfordert keine Vorkonditionierung des Rohrs und ermöglicht die Überwachung des Metalls durch eine Sedimentschicht von bis zu 35 mm. Der Diagnoseroboter ist mit sechs Raupenfahrwerken ausgestattet und kann Bereiche mit hohem Verschmutzungsgrad durchqueren. Wir bieten mit dieser Anlage Inline-Rohrinspektionen an.
Der Roboter wird durch einen mindestens 400 mm x 600 mm großen Schnitt in das Rohr eingeführt. Der Roboter muss keine Ladekammer in das Rohr schweißen. Für die Roboterbewegungen und die Diagnose ist kein Druckwasser in der Leitung erforderlich. Das HeatScan-Diagnosesystem verwendet ein modifiziertes magnetisches Inspektionsverfahren, um Defekte zu erkennen. Diese Methode ist im Gegensatz zur Ultraschallmethode unempfindlich gegenüber korrosionsbedingten Oberflächenunregelmäßigkeiten. Der Roboter misst die Restdicke der Rohrwand an Stellen, die aufgrund von Ablagerungen und starker Korrosion mit anderen Prüfmethoden nicht inspiziert werden können.


Der Roboter verfügt über ein abgedichtetes Gehäuse, das ein direktes Arbeiten durch Eintauchen in Wasser ermöglicht. Die Wassertemperatur kann 50°C betragen. Die Prüfgeschwindigkeit beträgt bis zu 200 Meter pro Stunde.
Technische Daten des HeatScan Inline-Inspektionssystems:
| Bereich der überwachten Durchmesser | DN400-DN1400 |
| Bereich der Rohrwanddicke | 1.5-16 mm |
| Hubbereich | 300 m |
| Die Menge der Ablagerungen auf der Innenfläche des Rohrs | Bis zu 35 mm |
| Größe der erkennbaren / messbaren Fehler | — Durchgangsdefekt mit einem Durchmesser von 6 mm — Korrosionsschäden mit einem Durchmesser von 30 mm und einer Tiefe von 20% der Wanddicke |
| Prüfgeschwindigkeit | 120 – 200 m/h |
| Anzahl der zu passierenden Biegungen | 4 Stück |
| T-Stücke weitergeben | Ja |
| Messfehler der Restdicke im Bereich der Fehlstelle | 15 % der Restdicke |
| Relative Luftfeuchtigkeit | 100% |
| Betriebstemperaturbereich | -20º…+70ºС |
| Druck | 101.3 kPa |
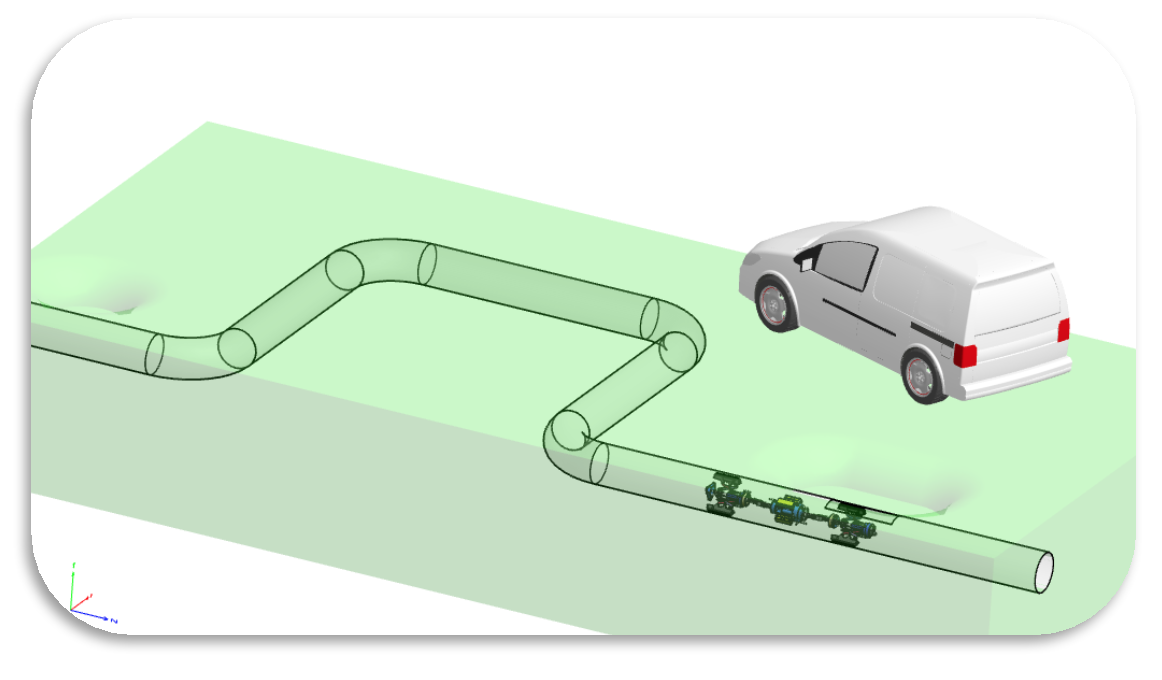
Verwendung des Geräts:






Prüfverfahren
Für die Diagnose muss der Zugang zur Rohrleitung gewährleistet sein: der Roboter wird durch einen Ausschnitt im Rohr geladen.Der Ausschnitt kann in einer Wärmekammer oder durch ein Bohrloch erfolgen.
Das Diagnosesystem, einschließlich des Bedienfelds, befindet sich im Diagnoselabor des Fahrzeugs auf dem Basis von B-Fahrzeugkategorie.
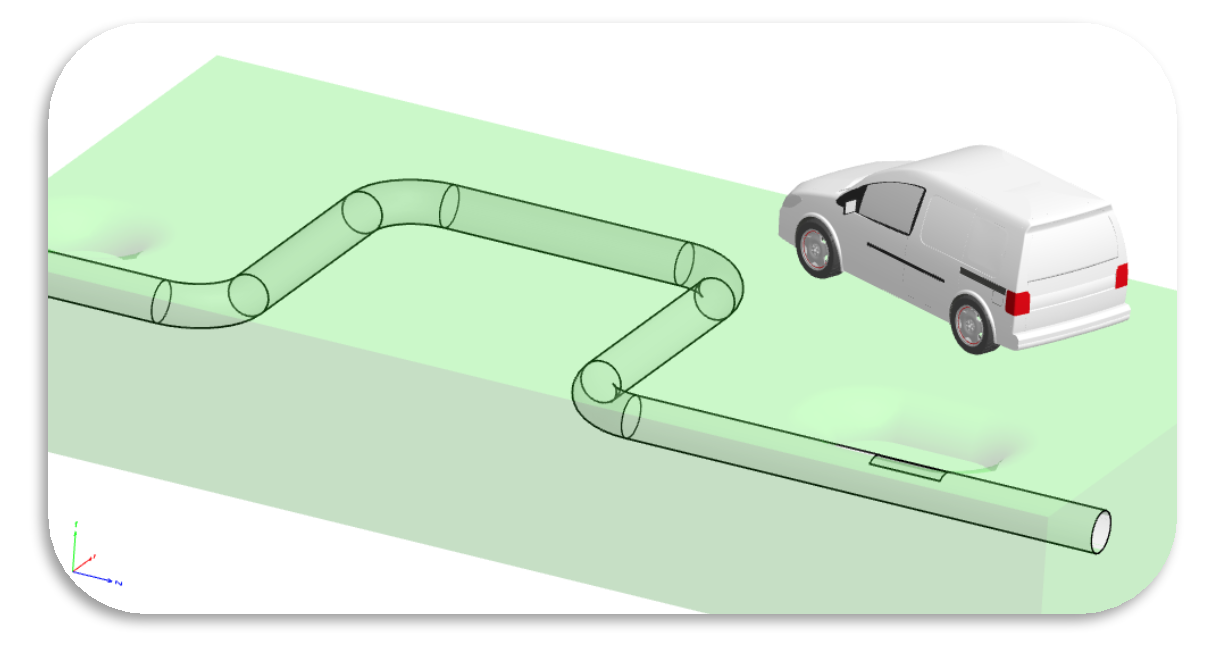
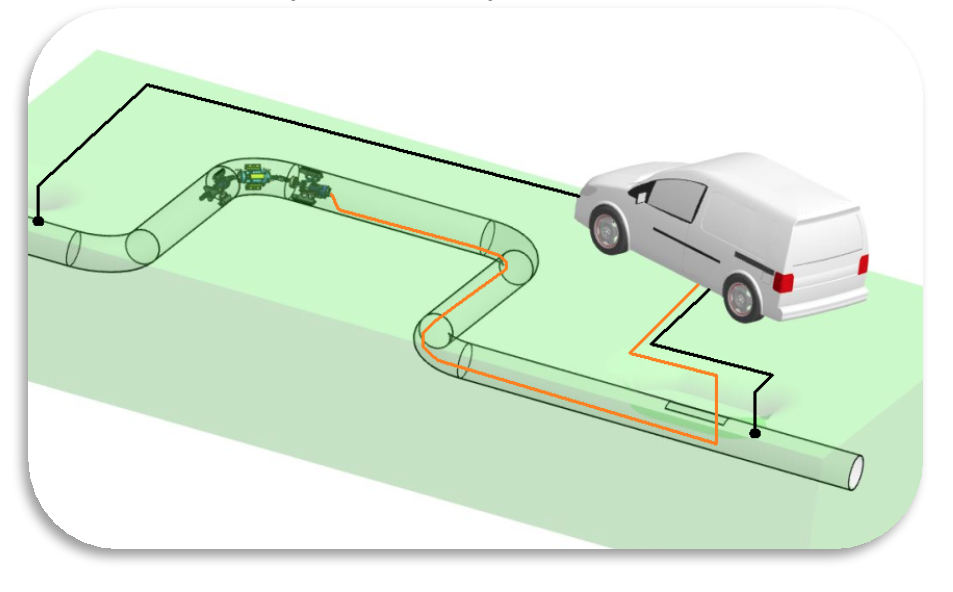
Von einem Ladepunkt aus kann der Roboter bis zu 500 Meter auf jeder Seite eines Ausschnitts diagnostizieren.
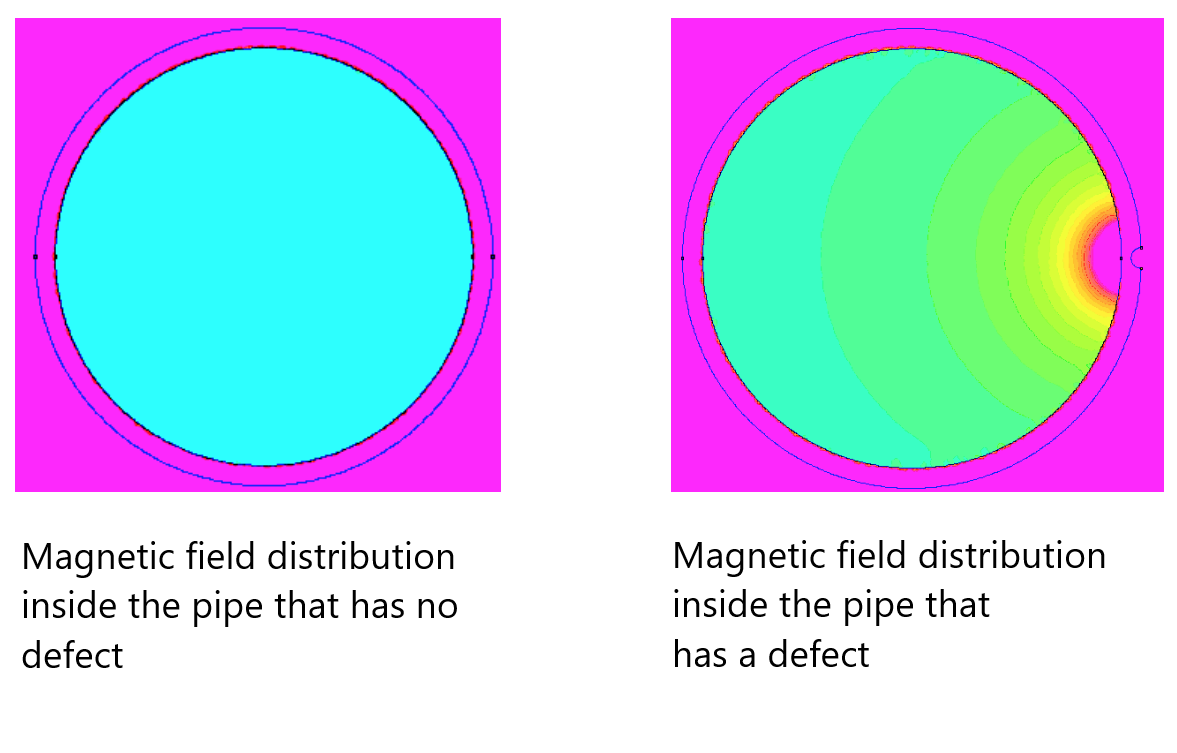
Die elektrischen Leitungen müssen an den Enden des zu diagnostizierenden Rohrabschnitts angeschlossen werden. Ein elektrischer Strom wird durch das Rohr geleitet; dies ist notwendig, um Magnetfelder zu induzieren, deren Verteilung von Sensoren am Roboter im Inneren des Rohrs erfasst wird.
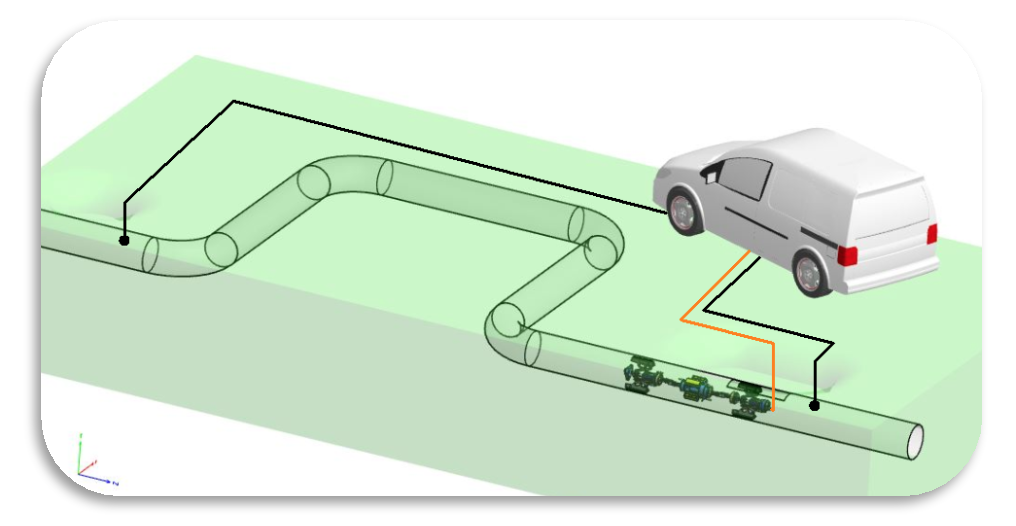
Der Diagnoseroboter bewegt sich im Inneren der Rohrleitung und scannt dabei 100 % der Rohrfläche. Sensoren erkennen Anomalien im Magnetfeld an defekten Stellen. Mit Hilfe eines speziellen Algorithmus ermittelt das Programm die Restdicke des Metalls.