Описание
ЭлектроМагнитно-Акустическое Преобразование, или ЭМАП, даёт возможность бесконтактно возбуждать в объекте контроля акустические волны различных типов с различной поляризацией. Современная элементная база позволяет создавать на основе ЭМАП дефектоскопы и толщиномеры, которые работают с рабочим зазором до 10мм. Т.е. между поверхностью объекта контроля и поверхностью датчика может располагаться краска, пластик, грязь, воздух, другие токонепроводящие среды с толщиной до 10мм. При этом акустическая волна формируется непосредственно в объекте контроля и не искажается контактной средой. Механизм формирования механических колебаний из электрических при ЭМАП можно разделить на три составляющие: магнитострикция, взаимодействие через силу Лоренца, и магнитное взаимодействие. Для контроля изделий из стали в большинстве случаев используется ЭМАП через силу Лоренца.
Принцип действия ЭМАП
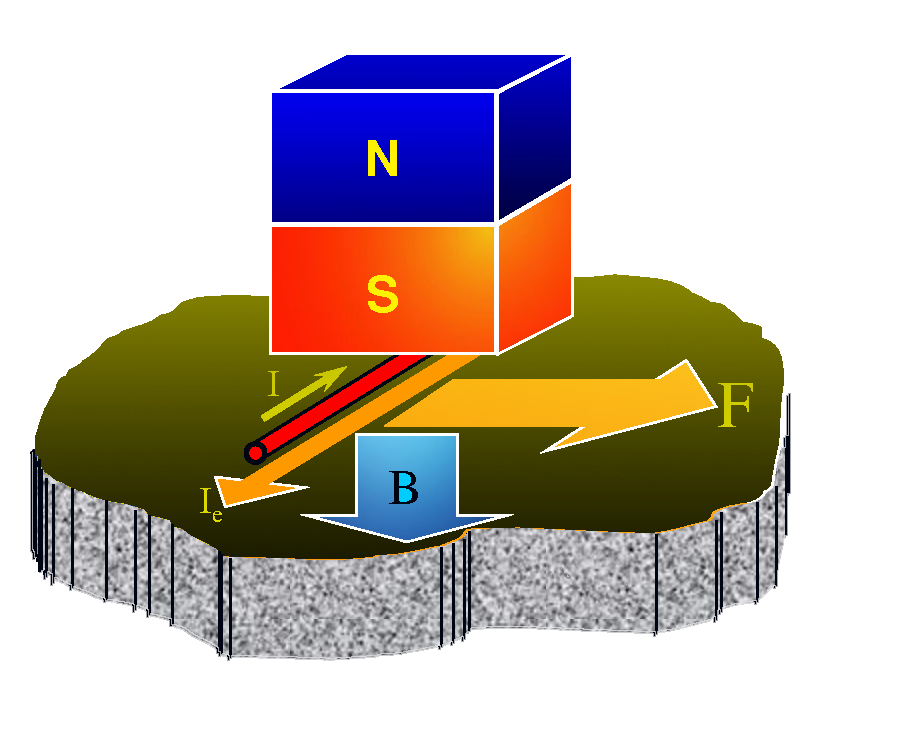
Структурная схема ЭМА преобразователя показана на рисунке. Преобразователь состоит из постоянного магнита и проводника с переменным током. Переменный ток I протекает через проводник и создаёт переменное магнитное поле B, которое проникает в объект контроля и, в свою очередь, создаёт в нём вихревые токи. Направление заряженных частиц, которые создают вихревые токи Ie, противоположно направлению тока в проводнике. Постоянный магнит создаёт нормально направленное по отношению к поверхности объекта контроля, постоянное магнитное поле. На заряженные частицы, двигающиеся в магнитном поле, действует сила Лоренца F, которая направлена вдоль поверхности объекта контроля. Сила Лоренца способствует некоторому механическому смещению области с вихревым током, что является началом формирования акустической волны.
Основные преимущества технологии с применением ЭМАП по сравнению с традиционным ультразвуковым контролем
-
Отсутствие контактной жидкости, столь необходимой для работы пъезопреобразователей
-
Отсутствие необходимости предварительной подготовки поверхности, такой как зачистка и зашлифовка
-
ЭМА преобразователи не чувствительны к углу наклона преобразователя относительно поверхности ввода акустической волны. От наклона преобразователя изменяется только уровень сигнала, направление волны, а следовательно временное положение эхосигналов не зависит от наклона преобразователя
-
Расстояние от поверхности датчика до поверхности объекта контроля может составлять до 10мм
-
Акустическая волна начинает распространение непосредственно на поверхности объекта контроля, минуя среду между преобразователем и объектом контроля. Благодаря этому, не происходит искажений волны в этой среде
-
ЭМА технология позволяет формировать различные типы волн с различной поляризацией: волны Лэмба, Релея, поперечные волны с горизонтальной, вертикальной и радиальной поляризацией, продольные волны
Продукция для неразрушающего контроля компании Октанта