Description
EMAT provides an opportunity for non-contact excitation of various acoustic waves with different polarizations in the tested object. Modern hardware base enables production of flaw detectors and thickness gauges that rely on EMAT and operate with operating clearances of up to 10 mm. This means that there could be paint, plastic, dirt, air and other non-conductive media, thickness up to 10 mm, between the surfaces of tested objects and the sensor surface. In this event, acoustic wave emerges in the tested object itself and it is not distorted by the contact medium. The mechanism of inducing mechanical vibrations on the basis of electrical vibrations in the course of EMAT can be divided into three components: magnetostriction, Lorentz force interaction and magnetic interaction. Lorentz force EMAT is mostly used to test steel products.
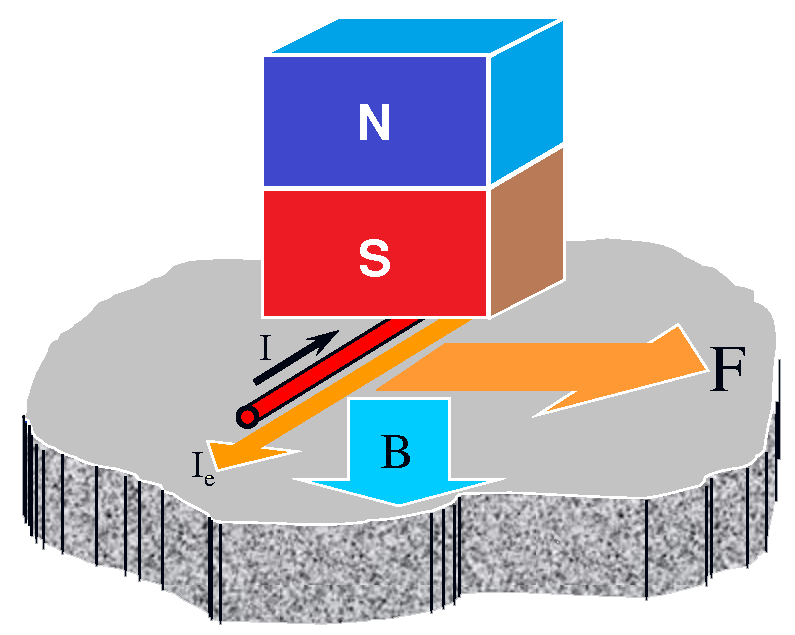
EMAT principle of operation
Please see the figure for the block diagram of an EMA transducer. The transducer consists of a permanent magnet and an alternating current conductor. Alternate current I is transmitted through the conductor and creates alternating magnetic field B that penetrates the tested object and, in turn, creates eddy currents within it. Charged particles that create eddy currents Ie move in the direction opposite to the conductor current. The permanent magnet creates permanent magnetic field directed positively relative to the tested object surface. Charged particles moving in the magnetic field are exposed to Lorentz force F directed along the tested object surface. Lorentz force contributes to a certain mechanical displacement of the eddy-current region, thereby inducing the formation of acoustic wave.
Key benefits of the EMAT testing technology as compared to conventional ultrasonic testing
- No couplant is needed for the operation of piezoelectric transducers
- No need for preliminary surface preparation such as cleanup and smoothing
- EMA transducers have no sensitivity to the angle of transducer inclination relative to the acoustic wave input surface. The transducer tilt changes only the signal level, and the wave direction and therefore temporal echo signal locations never rely on the transducer tilt
- The distance from the sensor surface to the tested object surface can reach 10 mm
- Acoustic wave starts its spread exactly on the tested object surface, bypassing the medium between the transducer and tested object. This prevents wave distortions in this medium
- The EMA technology allows inducing various waves with different polarizations, such as: Lamb waves, Rayleigh waves, lateral waves with horizontal, vertical and radial polarization, longitudinal waves
Non-destructive testing products by Oktanta